加法定理
加法定理は以下になります。
\[\sin(x + y) = \sin x \ \cos y + \cos x \ \sin y\]
\[\cos(x + y) = \cos x \ \cos y - \sin x \ \sin y\]
加法定理からベクトルの回転の公式が得られます。
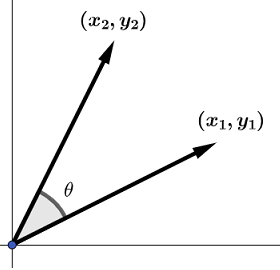
\[\begin{split}x_2 = x_1 \ \cos \theta - y_1 \ \sin \theta
\\
y_2 = x_1 \ \sin \theta + y_1 \ \cos \theta\end{split}\]
順運動学
軸の角度から手先の位置と姿勢(角度)を求めることを順運動学と言います。
順運動学はベクトルの回転の公式を使って計算できます。
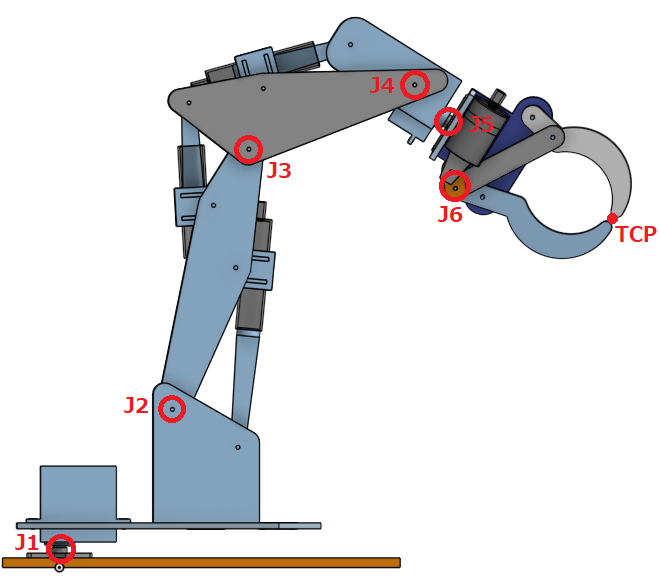
このロボットアームには6個の可動軸があり、アームの根本からJ1, J2, J3, J4, J5, J6と言います。
アームの手先の位置をTCP(Tool Center Point)と言います。
アームを真横から見るとJ1とJ2の位置は固定です。
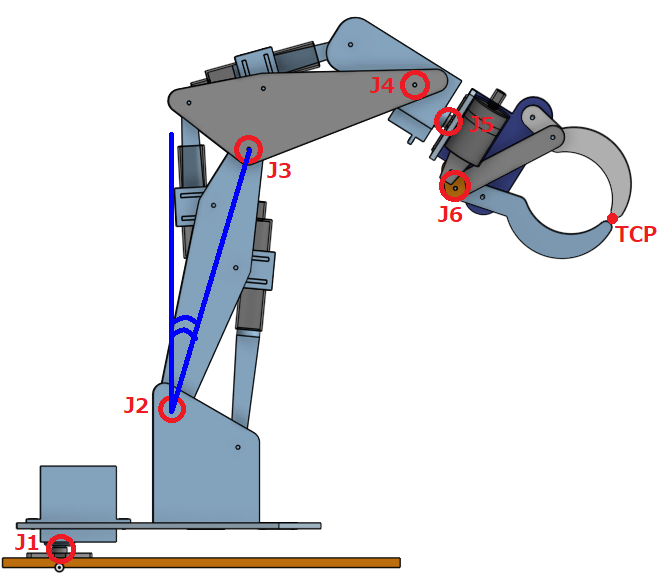
J3の位置はJ2の回転角から求まります。
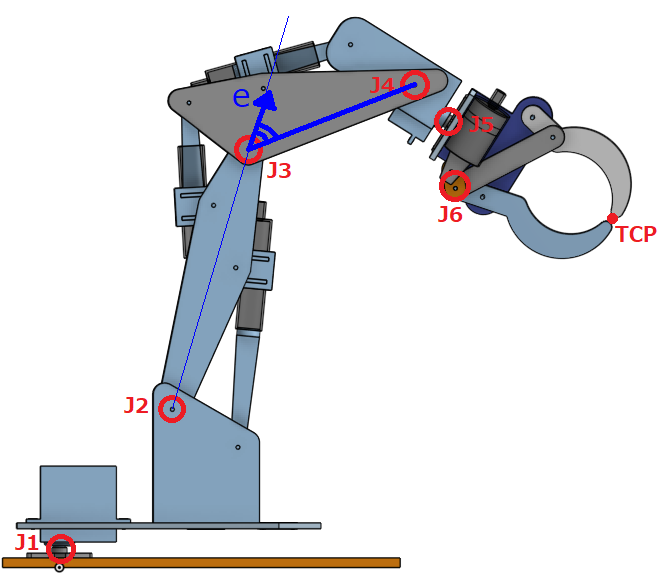
J2からJ3に向かう単位ベクトルをeとします。
J4の位置はベクトルの回転の公式を使い、eとJ3の回転角から求まります。
J5の位置も同様にベクトルの回転の公式を使い、J4の回転角から求まります。
J6はハンドを開閉させるだけなので位置は関係ありません。
TCPの位置もベクトルの回転の公式を使い、J4の回転角から求まります。
以上のように、加法定理を使って順運動学が解けます。