三角関数の微分と積分
S字加減速
モーターを滑らかに加速と減速をすることをS字加減速と言います。
急に加減速をすると、大きな電流が流れて過電流になる危険があるので
滑らかな加減速は重要です。
S字加減速には一般に三角関数を使います。
まず、距離や速度の関係をまとめます。
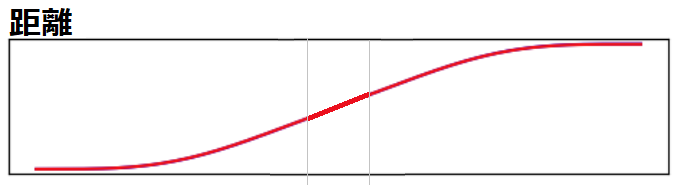
距離の微分が速度です。
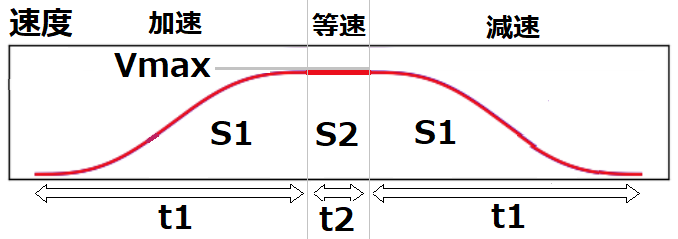
加減速時間を \(t_1\) 、等速時間を \(t_2\) とします。
加速中の移動距離を \(S_1\) 、等速での移動距離を \(S_2\) とします。
最高時速を \(v_{max}\) とします。
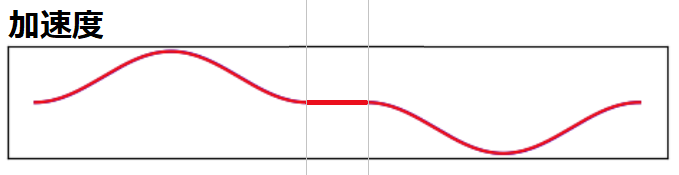
速度の微分が加速度です。
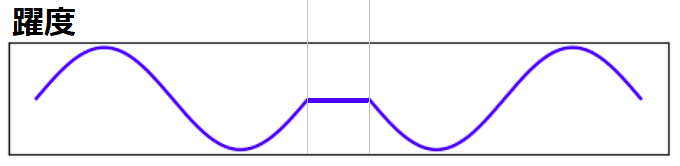
加速度の微分を躍度と言います。
躍度 \(\mathrm{jerk}\) を以下の式で定義します。
\[\begin{split}\begin{eqnarray}
\mathrm{jerk}(t)
=
\begin{cases}
A \ \sin(\omega t) & ( \boldsymbol{加速中} ) \\
0 & ( \boldsymbol{等速中} ) \\
- A \ \sin(\omega t) & ( \boldsymbol{減速中} )
\end{cases}
\end{eqnarray}\end{split}\]
以下では証明は省略して結果だけを書きます。
加速度 \(\mathrm{acc}\)
\[\mathrm{acc}(t) = \frac{A}{\omega} \ (1 - \cos(\omega t))\]
速度 \(\mathrm{vel}\)
\[\mathrm{vel}(t) = \frac{A}{\omega} \ (t - \frac{\sin(\omega t)}{\omega})\]
距離 \(S\)
\[S(t) = \frac{A}{\omega}( \frac{1}{2} t^2 + \frac{\cos(\omega t) - 1}{\omega^2} )\]
躍度の定義式の中のω
\[\omega = \frac{2 \pi}{t_1}\]
躍度の定義式の中のA
\[A = \frac{v_{max} \ \omega^2}{2 \ \pi}\]
加速中の移動距離 \(S_1\)
\[S_1 = \frac{v_{max} \ t_{1} }{2}\]
上の \(S_1\) の式はとても重要です。
実際にロボットアームを制御するときは、最高速度 \(v_{max}\) と加速時間 \(t_{1}\) を調節して、指定した距離を移動します。