平面の方程式と平面からの距離
このシステムではロボットアームの手先の位置の補正のために
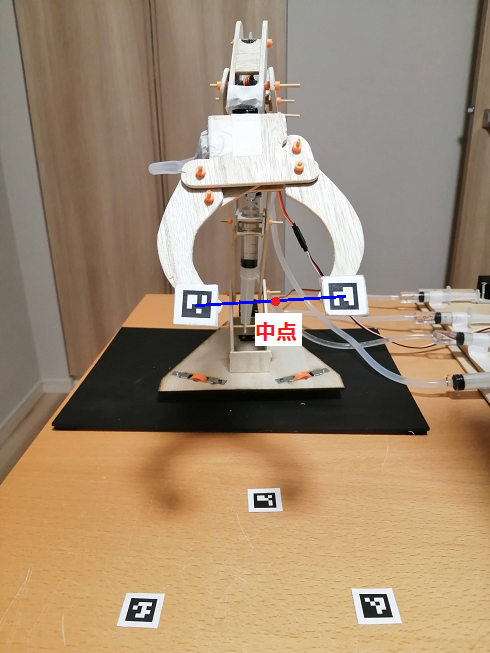
ArUcoというQRコードのようなマーカーを使っています。
このマーカーをパソコンに接続したウェブカメラで撮影するとマーカーの位置が分かります。
マーカーは作業台に3個、手先に2個を付けています。
平面の方程式
平面は3点の位置から決まるので、作業台の3個のマーカーの位置から作業台の平面の方程式が求まります。
空間内の点と平面との距離
手先の2個のマーカーの中点が手先の位置になります。
手先と作業台との距離は、空間内の点と平面との距離の公式から求まります。
手先が作業台に衝突しないためと、作業台上の物体をつかむために、手先と作業台との距離は重要です。