モーター
最初にモーターに関連する物理量をまとめておきます。
力Fを加えて距離Lを移動したとき、仕事Wは以下で定義されます。
仕事率Pは時間当たりの仕事です。
回転運動の場合、トルクTを加えて角度θだけ回転させたとき、仕事Wは以下で定義されます。
回転運動の仕事率 \(P_m\) は時間当たりの仕事で、角速度を \(\omega\) とすると以下の式になります。
電力 \(P_e\) は、電圧Vと電流Iの積です。
電力をモーターで動力に変換する場合 \(P_m = P_e\) なので以下の式になります。
実際は電力の変換の際に損失が発生するので、 \(\mu\) を変換効率とすると以下の式になります。
フレミング左手の法則により、モータのトルクTは電流に比例します。 \(K_t\) はトルク定数です。

以上を踏まえた上で、実際のモーターの仕様からモーターの特性のグラフを描いてみます。
上はプラモデルなどでよく使われるマブチモーターのFA-130RAの仕様です。
https://www.mabuchi-motor.co.jp/motorize/branch/motor/pdf/fa_130ra.pdf
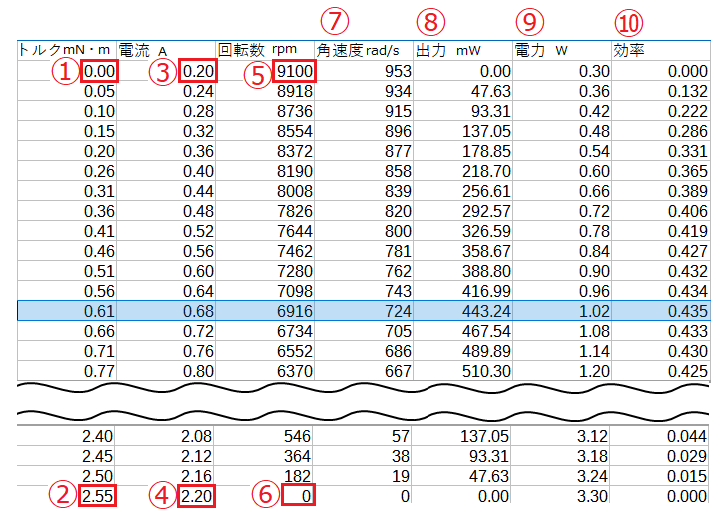
以下の手順で表計算ソフトに値を入れます。
最初の行には無負荷(NO LOAD)での値を入れ、最後の行には停止時(STALL)の値を入れます。
⑦ 角速度の列に 回転数 × 2 × π ÷ 60 の値を入れます。
⑧ 出力の列に トルク × 角速度 の値を入れます。
⑨ 電圧を1.5Vとして、電力の列に 1.5 × 電流 の値を入れます。
⑩ 効率の列に 0.001 × 出力 ÷ 電力 の値を入れます。
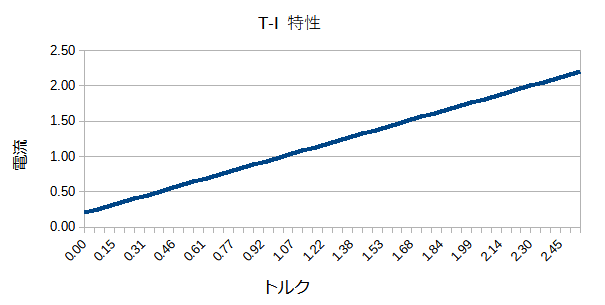
これはトルクと電流のグラフで、T-I特性と言います。
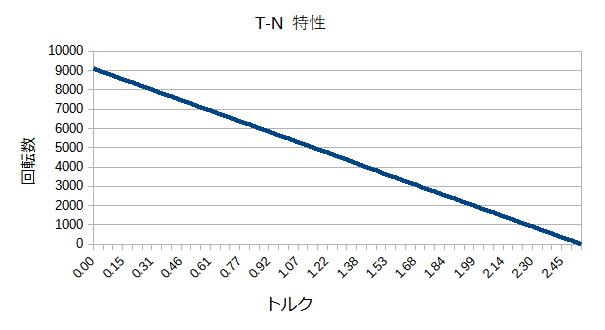
これはトルクと回転数のグラフで、T-N特性と言います。
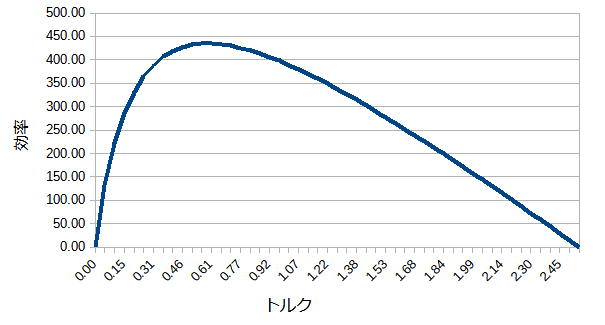
これはトルクと効率のグラフです。
モーターの仕様の最高効率(AT MAXIMUM EFFICIENCY)の欄は以下の値になっています。
速度(SPEED) |
電流(CURRENT) |
トルク(TORQUE) |
出力(OUTPUT) |
|---|---|---|---|
6990 |
0.66 |
0.59 |
0.43 |
これは表計算ソフトで最高効率の行(水色の行)とほぼ等しい値になっています。
微妙に値がずれるのは電力の変換効率 \(\mu\) が定数でないからかも知れません。